BETAALBAAR 3D SCANNEN & INMETEN
Bestel een pointcloud, laat een 3D model maken
of huur een scanoperator in.
De LaserscanService maakt 3D scans betaalbaar. We leveren 3D laserscans aan bedrijven die willen werken met betrouwbare pointclouds. Bij ons bestel je 3D scans van de juiste kwaliteit die passen bij jouw project. Of je huurt een 3D scanner inclusief ervaren operator voor de laagste prijs.
Je bestelt een pointcloud voor jouw project of huurt een ervaren scanoperator in en zet zelf de pointcloud om tot een 3D model. Ook hebben wij een Scan to BIM service. We maken 3D modellen zoals IFC, Revit, Archicad, DWG en mesh-modellen. LaserscanService heeft altijd de oplossing die past bij jouw vraag. Wij gaan graag voor je aan de slag!
DE 3 PIJLERS VAN LASERSCANSERVICE
Pointcloudservice
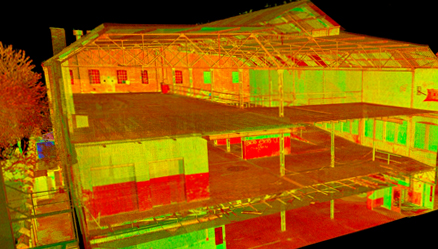
3D laserscans en pointclouds
LaserscanService is de toegankelijke, budgetvriendelijke manier om een pointcloud te laten maken van gebouwen, terreinen, installaties of andere objecten.

Modelleerservice
Revit-, Archicad- en AutoCAD-modellen voor de bouw en industrie
LasercanService scant bestaande gebouwen en terreinen in en maakt 3D (BIM) modellen. Bijvoorbeeld Revit- of Archicad modellen. Ook voor IFC modellen kun je bij ons terecht.

Facilityservice
Producten voor facility, beheer & onderhoud
We digitaliseren gebouwen, maken plattegronden, NEN2580 oppervlakten certificaten, 3D viewers, vluchtwegplattegronden en verkooptekeningen
SCANNER HUREN MET OPERATOR
Weet je precies wat je wilt en heb je ervaring met 3D scanning? Huur dan één van onze ervaren operators in voor een speciaal laag uurtarief.
Onze scanoperators doen dit werk dagelijks waardoor zij snel en efficiënt metingen verrichten.
